
重塑跨智能体灵巧手抓取,NUS邵林团队提出全新交互式表征,斩获CoRL Workshop最佳机器人论文奖
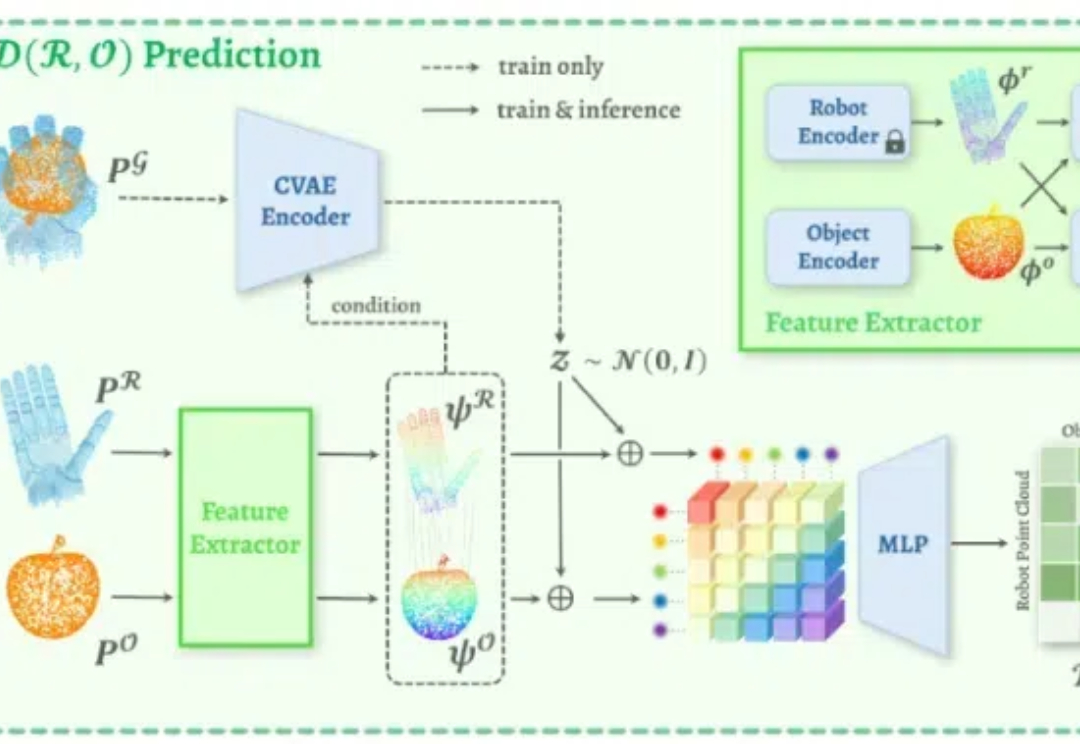
重塑跨智能体灵巧手抓取,NUS邵林团队提出全新交互式表征,斩获CoRL Workshop最佳机器人论文奖近期,新加坡国立大学计算机学院的邵林团队提出了 D(R,O) Grasp:一种面向跨智能体灵巧抓取的机器人与物体交互统一表示。该方法通过创新性地建模机器人手与物体在抓取姿态下的交互关系,成功实现了对多种机器人手型与物体几何形状的高度泛化能力,为灵巧抓取技术的未来开辟了全新的方向。
来自主题: AI技术研报
9151 点击 2024-12-21 11:21